
Holger Klein, Germany
This is a rigid body simulation using XPBD as discussed in the paper "detailed rigid body simulation with XPBD". It is written in C++ and runs in the browser using webassembly. Collisions between the cubes are handled using GJK together with the expanding polytope algorithm (EPA) to get the contact points and normal. The axis aligned bounding boxes (AABBs) of each cube are stored in a spatial hash grid which is rebuild once per substep. This way, boxes are checked for collisions only if their AABBs overlap. The walls are checked separately, by computing if any of the vertices of the rigid body is behind any of them.
Demo
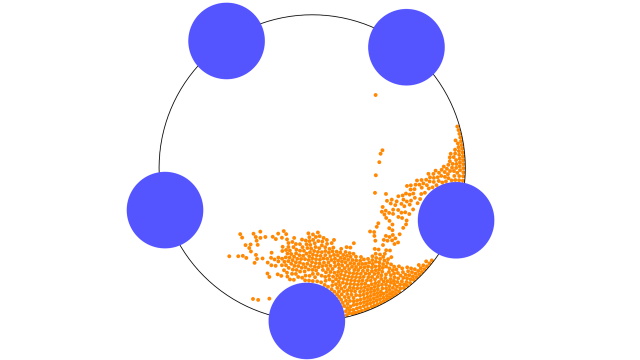
Sergii Biloshytskyi, Ukraine
This is a simple demo was inspired by PBD Papers by Matthias Muller
et. al. It shows simple simulation of many particles and some moving
boundaries. Particle friction is simulated using two different
approaches found in PBD papers.
Code
Demo
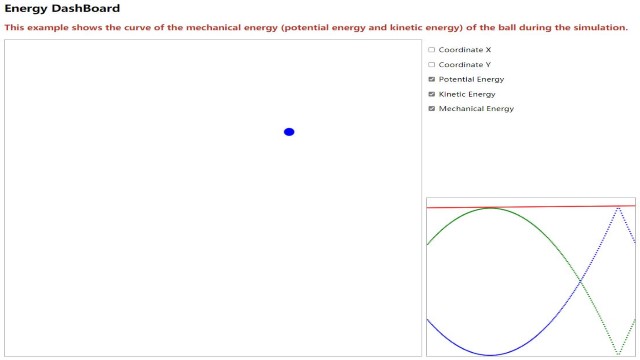
Shengzhe Hou, China
This demo shows the curve of the mechanical energy (potential energy and kinetic energy) of the ball during the simulation..
Code
Demo
Shengzhe Hou, China
The triple pendulum in 3d!
Code
Demo
Shengzhe Hou, China
The triple pendulum in 3d with trail!
Code
Demo